
Respones correctamente sobre los esnsores y actuadores utilizados en arduino
PREGUNTA 1 de 10

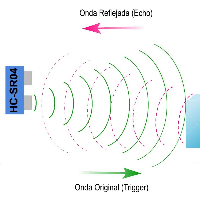
¿Cómo funciona el sensor ultrasónico HC-SR04 para medir la distancia?
⚪
A)
Emite una señal infrarroja y mide su reflexión
⚪
B)
Emite una señal ultrasónica y mide su reflexión
⚪
C)
Emite una señal de luz y mide su reflexión
⚪
D)
Emite una señal magnética y mide su reflexión
PREGUNTA 2 de 10

¿Qué rango de distancia puede medir el sensor ultrasónico HC-SR04?
⚪
A)
2-200 cm
⚪
B)
2-400 cm
⚪
C)
5-300 cm
⚪
D)
1-100 cm
PREGUNTA 3 de 10
¿Qué pines se utilizan para conectar el sensor ultrasónico HC-SR04 a un Arduino?
⚪
A)
VCC, GND, TRIG, ECHO
⚪
B)
VCC, GND, DATA, CLK
⚪
C)
VCC, GND, SCL, SDA
⚪
D)
VCC, GND, RX, TX
PREGUNTA 4 de 10

¿Qué tipo de sensor es el TCRT5000 y cuál es su principio de funcionamiento?
⚪
A)
Sensor de presión, mide cambios de presión
⚪
B)
Sensor de infrarrojos, mide reflexión de luz IR
⚪
C)
Sensor de temperatura, mide cambios de temperatura
⚪
D)
Sensor magnético, mide cambios de campo magnético
PREGUNTA 5 de 10

¿Qué aplicaciones comunes utilizan el sensor TCRT5000?
⚪
A)
Sensores de proximidad
⚪
B)
Seguidores de línea
⚪
C)
Contadores de objetos
⚪
D)
Todas las anteriores
PREGUNTA 6 de 10

¿Cómo se puede calibrar el sensor TCRT5000 para mejorar la precisión?
⚪
A)
Cambiando la resistencia de pull-up
⚪
B)
Ajustando la posición del sensor
⚪
C)
Utilizando un software de calibración
⚪
D)
Todas las anteriores
PREGUNTA 7 de 10

¿Qué es un servomotor y cómo funciona?
⚪
A)
Un motor de corriente continua que se controla con un potenciómetro
⚪
B)
Un motor de corriente alterna que se controla con un inversor
⚪
C)
Un motor que se controla mediante señales PWM para ajustar su posición
⚪
D)
Un motor que se controla con una batería de alta capacidad
PREGUNTA 8 de 10

¿Cómo se controla un servomotor con un Arduino?
⚪
A)
Mediante señales de corriente continua
⚪
B)
Mediante señales PWM generadas por el Arduino
⚪
C)
Mediante señales de voltaje constante
⚪
D)
Mediante señales analógicas
PREGUNTA 9 de 10

¿Qué pines se utilizan para conectar un servomotor a un Arduino?
⚪
A)
VCC, GND, SIG
⚪
B)
VCC, GND, DATA
⚪
C)
VCC, GND, PWM
⚪
D)
VCC, GND, RX
PREGUNTA 10 de 10

¿Cuál es la diferencia entre un servomotor de rotación continua y uno de rotación limitada?
⚪
A)
El de rotación continua gira indefinidamente, el de rotación limitada tiene un ángulo máximo
⚪
B)
El de rotación continua solo gira en un sentido, el de rotación limitada en ambos
⚪
C)
El de rotación continua es más grande, el de rotación limitada es más pequeño
⚪
D)
No hay diferencia entre ellos





















































































































































Este test aún no tiene comentarios 🤔